


5.3 Realität und Modell
Beispiel 5.3-1: Roboter
Abb. 5.3-1 veranschaulicht den Prozess der Modellbildung am Beispiel eines Roboters.
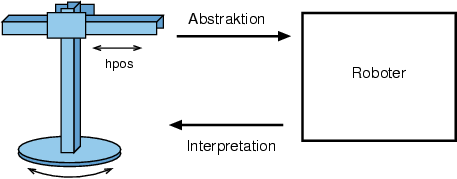
Abb. 5.3-1:
Roboter - Wirklichkeit und Modell
In Abb. 5.3-1 erkennen wir ein abstrahiertes Abbild des Roboters mit seiner Steuerung, die uns zunächst als undurchsichtiger oder schwarz (umrandet)er Kasten (engl. black box) erscheint.
In Abb. 5.3-2 sind wesentliche Eigenschaften des Roboters, wie sein ausfahrbarer Arm, sein drehbarer Fuß und sein Bewegungszustand (aktiv, inaktiv) in den Merkmalen Extension, Winkel und Aktivierung zusammengefasst. Diesen Merkmalen sind Datentypen zugeordnet, die etwas über ihre zulässigen Werte aussagen. (Das Merkmal Aktivierung kann offensichtlich nur zwei Werte annehmen, da der Datentyp boolean, den Sie bereits aus früheren Kursen kennen, nur die Werte wahr und falsch umfasst. Dazu später mehr.)
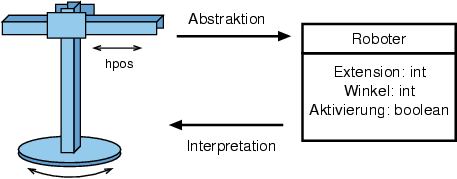
Abb. 5.3-2:
Robotereigenschaften im Modell
In Abb. 5.3-3 sind die Fähigkeiten des Roboters durch Operationen, die etwas über den möglichen Umgang mit dem Gegenstand „Roboter“ mitteilen, dargestellt.
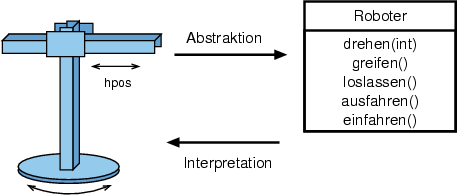
Abb. 5.3-3:
Roboterverhalten im Modell
Abb. 5.3-4 zeigt alle Aspekte zusammen.
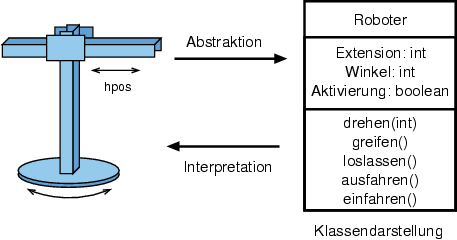
Abb. 5.3-4:
Eigenschaften und Verhalten im Robotermodell


